 Modes & Phases¶
Modes & Phases¶
Modes definition¶
The flight modes determine who is in charge of controlling each one of the aircrafts control channels. Each of the channels represents a control output, defined by the customer in the Block Programs configuration. In the Embention VTOL aircraft these channels are linked in order to each control output of the SU matrix.
Channel |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
Control output |
u0 |
u1 |
u2 |
u3 |
u4 |
u5 |
u6 |
u7 |
u8 |
Action |
Pitch (Q) |
Throttle (Q) |
Roll (Q) |
Yaw (Q) |
Pitch (P) |
Thrust (P) |
Roll (P) |
Adverse Right Yaw (P) |
Adverse Left Yaw (P) |
There are four different control modes and it is possible to combine them to create custom flight modes. The options available are:
auto: Automatic mode.
rc: Radio Control mode, i.e. manual mode.
arc: Arcade mode, this could be considered as a mix between automatic and manual.
mix: In this mode, it is possible to select in which step of the controller the pilot command will enter.
For more information on these control modes, visit the Modes - Control section of the 1x PDI Builder user manual.
For each of the channels of the 4 flight modes defined, a control mode must be assigned to it.
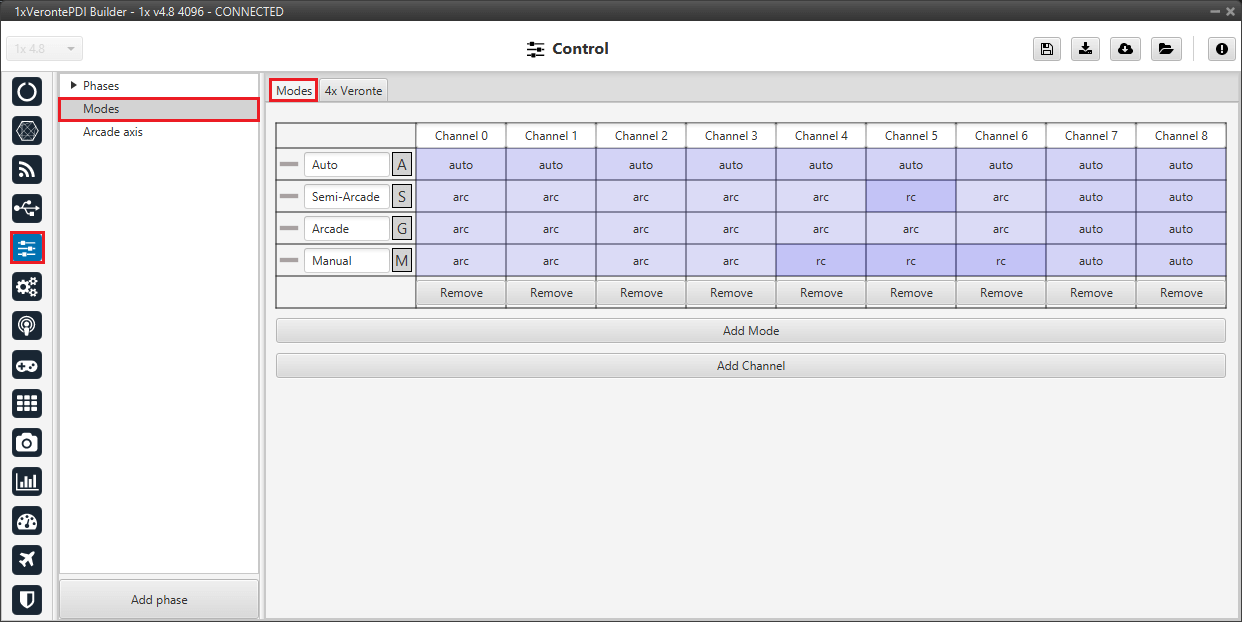
Modes definition¶
Note
The controls to perform the control action Adverse Yaw, correspond to channels 7 and 8 and are performed in Auto mode.
This is because these actions are complementary to the Roll movement, so being a correction, they must be performed automatically by the autopilot for all flight modes.
Auto flight mode
AIn this mode, all control outputs (channels) defining the aircraft performances are automatically controlled by the autopilot (auto mode).
Semi-Arcade flight mode
SIn this mode, the Pitch, Thrust, Roll and Yaw controls are controlled in arc mode. That is, the input information is sent from the pilot’s stick to the autopilot, and it is the autopilot that takes over the performance.
The Throttle action is controlled directly by the pilot stick in rc mode.
Arcade flight mode
GIn this flight mode, the aircraft performances are controlled in arc mode. So, when the pilot commands a desired pitch, roll, IAS, heading and so on, and it will be the control system that will be in charge of making the platform follow those commands.
Manual flight mode
MThe manual flight mode mixes rc control mode with arc:
For the quadcopter control, arc mode must be defined since the pilot’s stick cannot act on the motors.
For the fixed wing control, rc mode can be set so that the pilot’s stick acts directly on the elevators and throttle.
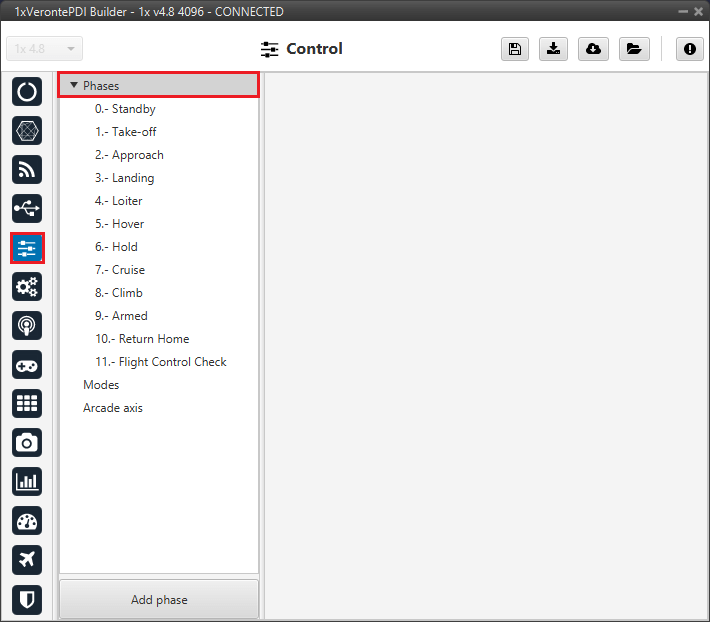
Phases definition¶
The flight phases that will control the aircraft in the different stages of the operation must be created (defined not configured).
For the operation of the Embention VTOL aircraft 12 flight phases have been defined:
Standby: All actuators are deactivated.
Take-off: Aircraft vertical take-off.
Approach: Execute approach maneuver to the runway defined for VTOL.
Landing: Aircraft vertical landing.
Loiter: Loiter at current position and altitude.
Hover: Maintain current 3D position.
Hold: Stabilize attitude and vertical speed.
Cruise: Follow defined mission.
Climb: Ascend to the loiter from the runway.
Armed: Vertical propellers run-up.
Return Home: Go to one of the pre-defined landing points and hover.
Flight Control Check: Manual check of elevators and horizontal motor.
Note
In addition to these phases, when Veronte Autopilot 1x boots up it is by default in the “Initial” phase.
Phases definition¶
Note
The configuration of the flight phases (guidance and control commands) is done in the Block Programs menu.
For more information, refer to the Phases - Control section of the 1x PDI Builder user manual.